














Conforme movía las manijas (arriba y abajo, izquierda y derecha), el robot imitaba cada pequeño movimiento con sus dos brazos. Entonces, cuando formó una pinza con los dedos pulgar e índice, una de las diminutas garras del robot hizo lo mismo. Esta es la manera en que cirujanos como Fer han usado robots desde hace tiempo cuando operan a pacientes. Pueden extirpar la próstata de un paciente mientras están sentados en la consola de una computadora del otro lado de la habitación.
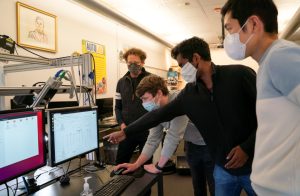
No obstante, después de esta breve demostración, Fer y sus compañeros investigadores en la Universidad de California, campus Berkeley, mostraron cómo esperan lograr que avance esa tecnología de punta. Fer soltó las manijas y un nuevo tipo de software informático tomó el control. A medida que él y otros investigadores observaban, el robot comenzó a moverse por su cuenta.
Con una garra, la máquina levantó un diminuto aro de plástico de un igualmente diminuto eje en la mesa, pasó el aro de una garra a la otra, lo movió a lo largo de la mesa y cuidadosamente lo ensartó en un nuevo eje. Después, el robot hizo lo mismo con varios aros más y completó la tarea tan rápidamente como lo había hecho cuando fue guiado por Fer.

El ejercicio de entrenamiento se diseñó originalmente para los humanos; mover aros de eje a eje es la forma en que los cirujanos aprenden a maniobrar robots como el de Berkeley. Ahora, un robot automatizado que realiza la prueba puede igualar o exceder a un humano en destreza, precisión y velocidad, según un nuevo artículo de investigación del equipo de Berkeley.
El proyecto forma parte de un esfuerzo mucho más amplio para llevar la inteligencia artificial al quirófano. Mediante el uso de muchas de las mismas tecnologías que sirven de base para los vehículos y drones autónomos, así como para los robots de los almacenes, los investigadores trabajan para automatizar también a los robots quirúrgicos. Estos métodos todavía están muy lejanos del uso cotidiano, pero el progreso se está acelerando.
“Es un momento emocionante”, dijo Russell Taylor, profesor en la Universidad Johns Hopkins y exinvestigador en IBM conocido en el mundo académico como el padre de la cirugía robótica. “Es donde yo esperaba que estuviéramos hace veinte años”.
Durante una llamada telefónica reciente, Greg Hager, un informático en Johns Hopkins, dijo que la automatización quirúrgica progresaría en gran medida como el software de piloto automático que guiaba su Tesla por la autopista de Nueva Jersey mientras él hablaba por teléfono. El auto manejaba por su cuenta, dijo, pero su esposa aún tenía las manos sobre el volante, por si cualquier cosa salía mal. Y ella tomaría el control cuando fuera momento de salir de la autopista.
“No podemos automatizar todo el proceso, al menos no sin supervisión humana”, dijo él. “Sin embargo, podemos comenzar a construir herramientas de automatización que hagan un poco más sencilla la vida de un cirujano”.
Hace cinco años, investigadores del Children’s National Health System en Washington D. C. diseñaron un robot que podía suturar de manera automática los intestinos de un cerdo durante una intervención quirúrgica. Fue un destacado paso adelante hacia el tipo de futuro vislumbrado por Hager. Sin embargo, llegó con una nota en letra chiquita: los investigadores habían implantado diminutos marcadores en los intestinos del cerdo que emitían una luz casi infrarroja y ayudaron a guiar los movimientos del robot.
El método está lejos de ser práctico, ya que los marcadores no se implantan ni se retiran con facilidad. Sin embargo, en años recientes, investigadores de inteligencia artificial han mejorado de manera significativa el poder de la visión computacional, lo que podría permitir que los robots realicen tareas quirúrgicas por su cuenta, sin dichos marcadores.
El cambio es impulsado por las llamadas redes neuronales, sistemas matemáticos que pueden aprender habilidades mediante el análisis de vastas cantidades de datos. Al analizar miles de fotografías de gatos, por ejemplo, una red neuronal puede aprender a reconocer un gato. De manera parecida, una red neuronal puede aprender de imágenes capturadas por robots quirúrgicos.
Los robots quirúrgicos están equipados con cámaras que graban video tridimensional de cada operación. El video se transmite a un visor al que los cirujanos se asoman mientras guían la intervención quirúrgica y ven desde el punto de vista del robot.
No obstante, posteriormente, estas imágenes también brindan un mapa detallado que muestra cómo se realizan las operaciones. Pueden ayudar a nuevos cirujanos a entender cómo usar estos robots y pueden ayudar a entrenar robots para manejar tareas por su cuenta. Al analizar imágenes que muestren cómo un cirujano guía al robot, una red neuronal puede aprender las mismas habilidades.
Así es como los investigadores de Berkeley han trabajado para automatizar su robot, el cual está basado en el Sistema Quirúrgico Da Vinci, una máquina con dos brazos que ayuda a los cirujanos a realizar más de un millón de procedimientos al año. Fer y sus colegas recolectan imágenes del robot mientras este mueve los aros de plástico que están bajo control humano. Después, su sistema aprende de esas imágenes, al calcular con precisión las mejores maneras de tomar los aros, pasarlo entre garras y moverlo a nuevos ejes.
No obstante, este proceso llegó con su propia nota en letra chiquita. Cuando el sistema le dijo al robot adónde moverse, el robot a menudo erraba por unos milímetros. Tras meses y años de uso, los numerosos cables de metal dentro de los dos brazos del robot se han estirado y doblado un poco, por lo que sus movimientos no eran tan precisos como debían serlo.
Los operadores humanos podían compensar este cambio, de manera inconsciente. Sin embargo, el sistema automatizado no podía hacerlo. Este a menudo es el problema de la tecnología automatizada: se le dificulta lidiar con el cambio y la incertidumbre. Los vehículos autónomos todavía están lejos de un uso extendido porque aún no son lo suficientemente flexibles para manejar todo el caos del mundo cotidiano.
El equipo de Berkeley decidió construir una nueva red neuronal que analizó los errores del robot y aprendió cuánta presión perdía con cada día que pasaba. “Aprende cómo las articulaciones del robot evolucionan con el paso del tiempo”, dijo Brijen Thananjeyan, un doctorando del equipo. Cuando el sistema automatizado podría representar este cambio, el robot podía agarrar y mover los aros de plástico, con lo que igualaría el desempeño de los operadores humanos.
Otros laboratorios intentan enfoques diferentes. Axel Krieger, un investigador en Johns Hopkins que fue parte del proyecto de suturar cerdos en 2016, trabaja para automatizar un nuevo tipo de brazo robótico, uno con menos partes móviles y que se comporte de maneras más consistentes que el tipo de robot usado por el equipo de Berkeley. Investigadores en el Instituto Politécnico Worcester están desarrollando maneras para que las máquinas guíen cuidadosamente las manos de los cirujanos mientras desempeñan tareas particulares, como insertar una aguja para una biopsia en búsqueda de cáncer o adentrarse en el cerebro para extirpar un tumor.
“Es como en un auto en el que el seguimiento del carril es autónomo, pero aún puedes controlar el acelerador y el freno”, dijo Greg Fischer, uno de los investigadores de Worcester.





